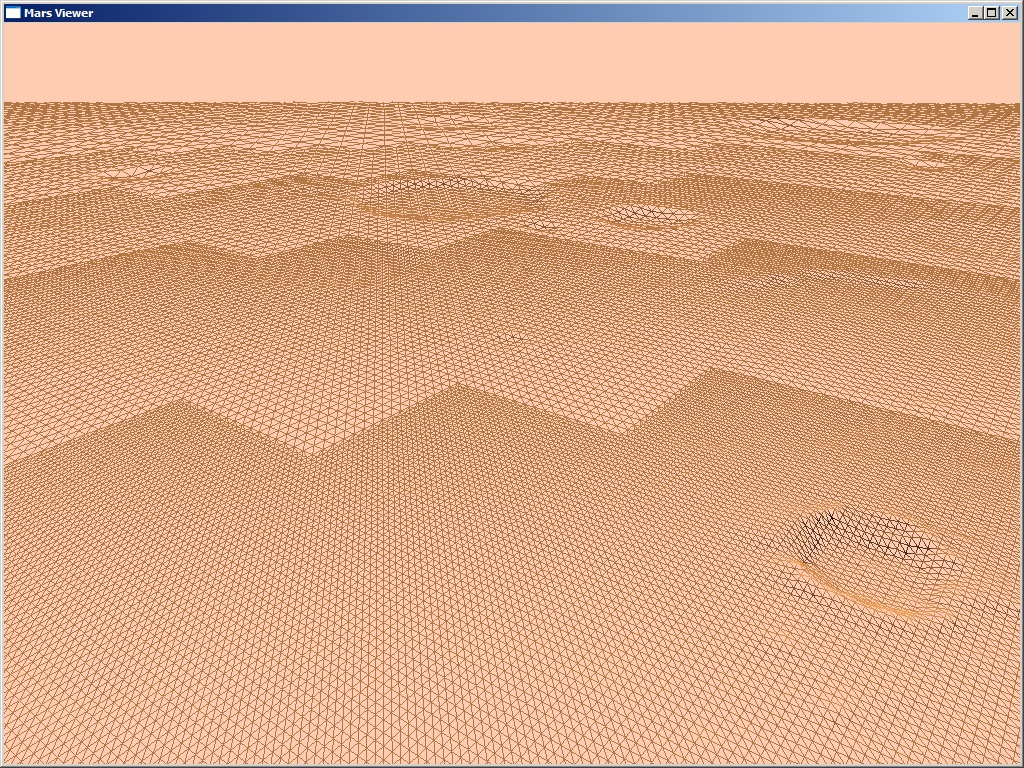
The Mars Visualizer is a tool I have developed to visualize this data set. It is a streaming Geometrical Mipmap visualizer for the MOLA data, which allows real time visualization and navigation on the surface of Mars. It has low memory requirement, not requiring that the whole dataset be available in RAM. Only the area being visualized is present in RAM, and small blocks of terrain are streamed in and out as the camera moves.
The advantages of Geometrical Mipmaps in this case are the simplicity of its implementation and the adequacy due to the fact that the source data is in the form of a regular grid.
The Mars Visualizer is a cross-platform application for Windows and Mac OS X, making use of IView, a framework that I've developed to facilitate OpenGL programming across different platforms.
Click on the images for a higher resolution view.